
 Sign in
Sign in How to send sms from Sinch
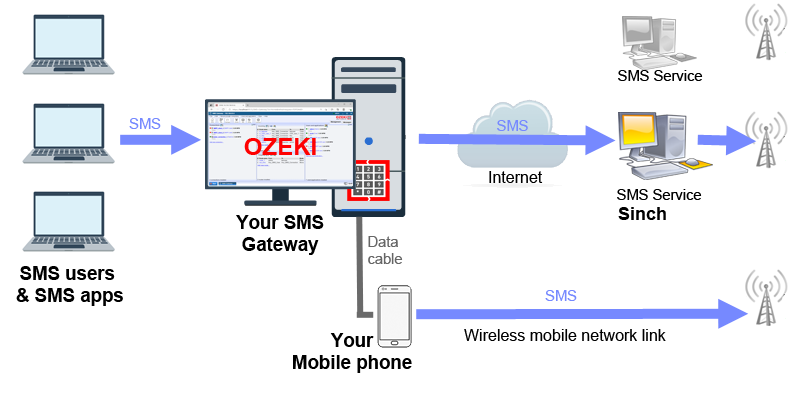
This guide shows information on how to send and receive sms messages with Sinch using Ozeki 10 SMS Gateway. Sinch is an SMS service provider company based in Stockholm, Sweden, so it is primarily providing SMS service to customers in Sweeden and the EU. The customer service of Sinch talks in Sweedish and English, so signing up to their service is quite easy. If you use Ozeki 10 SMS Gateway, it is easy to setup a connection to the Sinch SMS service. The following instructions can be used to set this connection up in 8 minutes. This article shows you the installation steps. We hope you will find the presented information beneficial.
What is the best way to send sms from Sinch (quick steps)
To send sms from Sinch get started with these straight forward directions:
- Setup Ozeki 10 SMS Gateway, then navigate to the red Ozeki 10 icon on your Windows desktop. This will open the Ozeki GUI. To send sms from Sinch you need to proceed with the configuration in this management console.
- In the Ozeki desktop start the SMS Gateway app. This can be done by clicking on the desktop icon or by navigating to the app in the Ozeki Start menu. The SMS Gateway app is used to send sms from Sinch.
- To send sms from Sinch all you have to do is to setup the Sinch connection by opening the 'Add new connection...' link.
How does Sinch SMS work?
Sinch is an SMS service provider and their sms service works the similar way as the service of other SMS service providers. They use SMS protocols, such as SMPP client connections, UCP/EMI protocol connections and HTTP SMS or REST SMS connections to connect their server computer to other SMS service providers and to mobile telephone network operators. Sinch creates income by selling the sms at a premium. Sinch provides an an HTTP API, that let's you to use to their text message service through web requests. Every texts is a single web request. Web requests are HTTP requests or REST api requests.
Detailed instructions to send sms from Sinch
To send sms from Sinch:
- Start the Ozeki management console
- Locate the panel named 'Connections' on the left
- Navigate to 'Add new connection...' in the 'Connections' panel
- Find Sinch connection and click install
- Ozeki 10 SMS Gateway will send the text messages with this connection
- Provide the configuration details on the Sinch config form
- Verify the settings, they must be right to be able to send sms messages
- To send your sms, use the Test tab
- Type in the recipient, the text and click send
- Open the events tab to see if your text messages was successfully sent
Configuration steps in Ozeki 10 SMS gateway
To configure an Sinch connection follow the instructions on the screenshots below.





Protect your phone number list
Your customer phone number list is a very valuable asset. You must make sure you take good care of it and you protect it. When you send text messages through Sinch or any other on-line SMS service provider, your customer phone numbers and the message texts will be visible to Sinch. It is a good practice to setup connections to multiple SMS service providers and to distribute your messages among them to make sure no entity has all your data. It is even a better practice to send messages wirelessly directly to the mobile network using an Android mobile phone or GSM modem attached to your computer with a phone-to-pc data cable. Note that this option is only viable if you send less then 10 000 SMS per day. Ozeki 10 SMS Gateway has a version that can be installed on an Android mobile. It is called Android sms gateway. It also offers the same APIs (e.g. C# SMS API), as the desktop version, it allows Office clients to connect, you can create E-mail to SMS configs, and you may even provide an Android SMPP SMS gateway service
How to save the messages sent through Sinch into a database
You can conifugre SQL logging for a Sinch connection. This is very useful, because it will help you keep track of all the SMS messages you have sent or received through the Sinch connection. This datbase log, can not only be used to lookup old message in case of disputes, but it can also be used to create weekly or monthly reports. These reports will let you know which user or application in your system sent the messages and what was the pattern of your sms traffic.
How to send sms from a database using Sinch
If you have a Sinch connection setup, you can easily Send and receive text messages from an SQL database server. To send and receive texts, Microsoft SQL Server, MySQL, SQLAnywhere, SAP HANA, MariaDB, Foxpro, SQLite or any other ODBC/SQL compatible database server can be used. This functionality is available through two database tables: ozekimessageout and ozekimessagin.
The ozekimessageout table shall be used for sending sms and the other, the ozekimessagein table is used to store incoming sms. To send a text message, all that needs to be done is use an SQL INSERT command to create an SQL entry in the ozekimessageout table. Ozeki will automatically pick up the sms and it will deliver it to the gsm network. During the delivery procedure it will update the status field in the database to inform you when the SMS was sent from your system, when was it received by the recipient and if an error occured, why wasn't it delivered.

This solution is beneficial, because no code is needed to match incoming submit reports, delivery reports and status reports to sent messages, because Ozeki SMS Gateway does this for you automatically. Everything related to the sms is stored in the corresponding SQL record. Another benefit is that it allows you to use custom queries and take advantage of SQL triggers and stored procedures.
Send texts from C# through Sinch
Automatic text messaging systems perform significantly better than humans. Due to this fact many companies prefer to build automated sms systems. Ozeki's C# SMS API provides an outstanding tool to create communication systems based on automated algorithms. This C# api is great because it can also send sms messages through high performance sms protocols, such as SMPP,UCP or CIMD2. These protocols are used by GSM telephone networks to exchange text messages between each other. By implementing this single API, you can reach many SMS carriers with a single code base.

How to send sms using text files through Sinch
Every software developer can create and read text files. Text files provide the most simple interface to send and receive SMS messages. Whether you use SAP or a custom built business application, you will likely have the optoin of exporting data in the form of csv, excel or plain txt files. If you have this option, you can send and receive SMS messages using Ozeki 10 SMS Gateway through Sinch. In this case two directories will be created, one for storing SMS messages to be sent, and another for saving incoming sms messages. Ozeki can be configured to save incoming SMS in the file format you prefer and it can pick up text files containing SMS messages to be sent. Once a text file is read, SMS messages are created and they are sent to the mobile network through the Sinch connection.
How to setup email to sms from Sinch
If you configure Sinch, you can provide an email to sms and sms to email service to customers and applications. Email users who can send an email to a formatted e-mail address can send sms. The format of the email address is phonenumber@hostname. An example e-mail address would look like this: 079797004@email.domain.com. You can also put the mobile number into the email subject. In both cases the email body is going to be forwarded as the text message to the specified phone number.
Sinch alternatives?
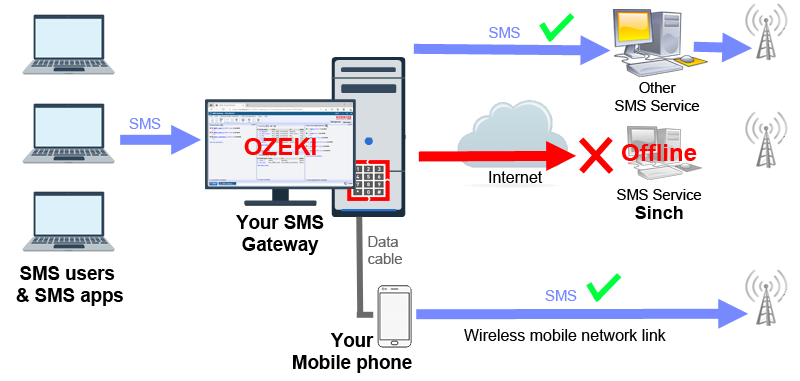
It is not too difficult to find a number of alternative SMS aggregators on the Internet. If you setup Ozeki SMS Gateway, you can connect to several SMS service providers and mobile networks simultaneouslyIt is benefitial to use multiple providers, because it allows you to comply with regulations effecting local networks and it allows you create backup routes. The most popular alternative to using Sinch is to connect an Android mobile phone to your SMS Gateway PC and send sms directly to the mobile network (Figure). This will let you system work even if Sinch fails.
What to do in case the Sinch service fails?
Since Ozeki can be installed on multiple computers in your site or in a virtualized system, and Ozeki makes it possible for you to reroute text messages to other SMS carriers automatically, with the help of Ozeki SMS Gateway, you can build a reliable, fail safe SMS service. All you have to do is setup multiple SMS service provider connections and configure one of the SMS routing options: to do load balancing, least cost SMS routing or backup routing. All of these SMS routing options will ensure that your SMS messages will be delivered even if a particular SMS service is out of operation.
Conclusion
Now, you can pause and catch your breath. We hope you didn’t get lost in the explanations. We did our very best to make it simple and to walk you through all the details as painlessly as possible. If you have followed the instructions closely, you should be able to send and receive text messages using the sms messaging service of Sinch, provided you have configured the connection properly in Ozeki 10 SMS Gateway. The HTTP SMS service of Sinch is not difficult to setup, and although it does not provide the same performance as an SMPP sms service, it is still a good option to use in 2021. The biggest benefit of Sinch is that an account can be setup in a matter of minutes on their website.
With Ozeki 10 SMS gateway you get access to cost control, which is normally not provided by SMS service providers. You can limit the number of messages leaving your system, so you don't have to worry about getting overcharged. To achieve this you can setup SMS credit limits for your customers, employees and SMS applications. To generate montly or weekly reports, you can use SQL logging and reporting. With the Ozeki SQL logging you can save all your SMS messages into your own SQL database. This gives you the ability to keep an eye on and control your SMS communication, and you will be able to trace back any SMS in case a problem occurs.
More information
- How to send SMS with amazon SNS
- How to send SMS from Clickatell
- How to send SMS using the MTN Developer APIs (MADAPI)
- Sunrise SMS service
- Vodafone SMS Service
- How to send SMS from Clicksend
- How to send SMS from Infobip
- How to send SMS using Messagebird
- How to send SMS using Nexmo
- How to send SMS from Sinch
- How to send SMS from Telnyx
- How to send SMS from Twilio